最即時的新聞資訊
就是要追蹤Angus電科技
最即時的新聞資訊
就是要追蹤Angus電科技
在自動駕駛車輛的部署競賽中,存在兩種主流思維,一派主張感測器融合,認為感測器越多、種類越豐富越好,另一派則是特斯拉的視覺優先學派。到目前為止,就連 Google 的執行長 Sundar Pichai 都形容特斯拉是自動駕駛領域的領導者。彭博社的最新分析提供了類似觀點,聚焦數據與實際安全指標,特斯拉的策略不僅可行,更大幅領先競爭對手。
文章目錄
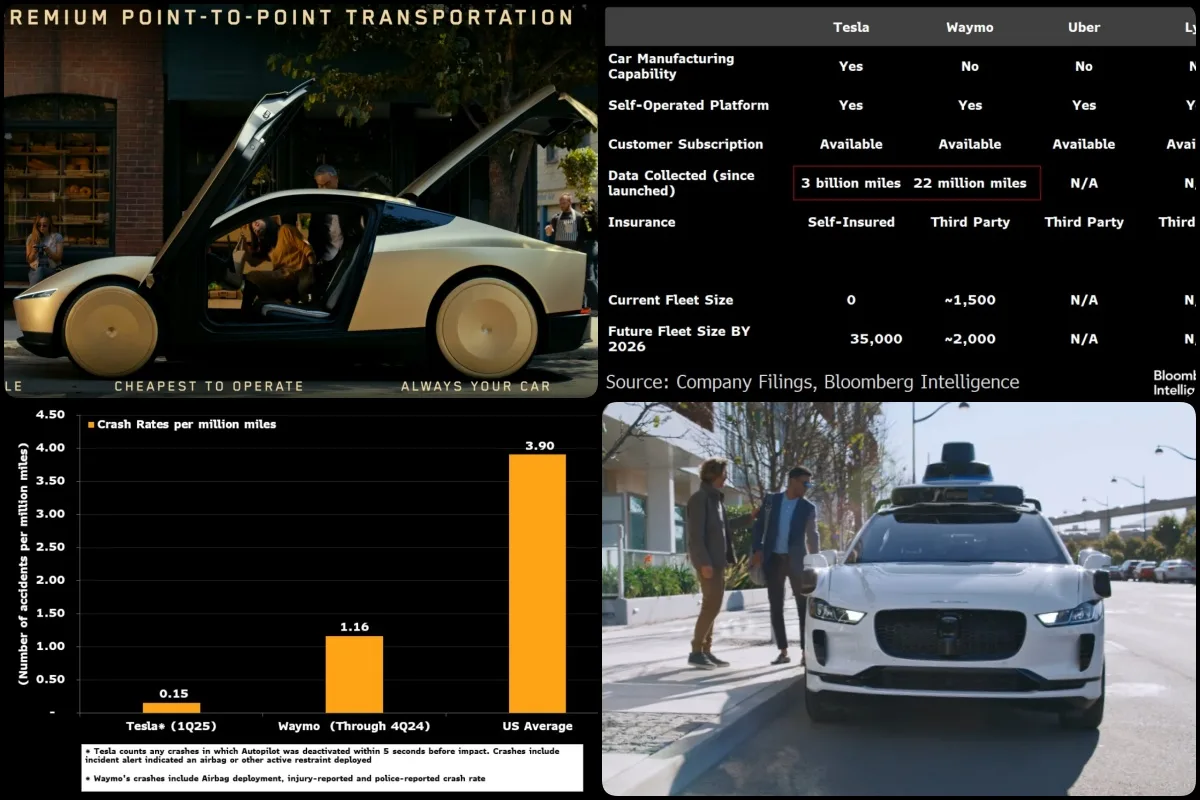
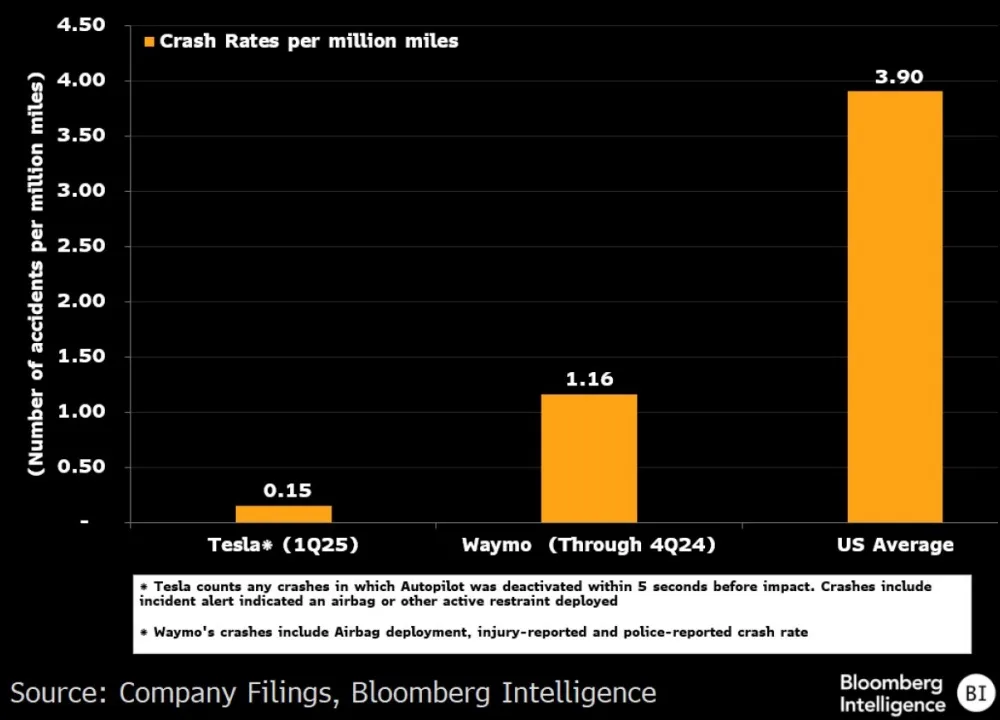
彭博社分析中最引人注目的數字與安全性有關,根據他們的比較,特斯拉 FSD 系統每行駛百萬英里約發生 0.15 起事故,而 Waymo 則每百萬英里約發生 1.16 起事故。
這意味著使用 FSD 的特斯拉發生事故的機率比 Waymo 車輛低七倍,即使後者配備了大量感測器。這與特斯拉最新的車輛安全報告一致,報告中指出使用 FSD 的特斯拉發生事故的機率比其他任何車輛的駕駛者低十倍。
歸根結底,雖然感測器融合技術可能很棒,但它提供的數據量實在太大難以處理分析。雖然 LiDAR、雷達和攝影機各有獨特優勢,但最終攝影機才是最多功能的。我們的道路和世界是圍繞視覺與聽覺設計的,所以純 LiDAR 的車輛無法在道路上導航,因為它看不見標誌或其他缺乏深度的物體。要讓 LiDAR 發揮作用,必須與視覺系統搭配使用。
視覺系統之所以有效,是因為它能適用於所有情境,而且隨著影像處理和 AI 技術的進步,這個系統還會持續改進。雖然視覺測量仍稍遜於 LiDAR,但已達到「夠用」的水準,我們並不需要 LiDAR 毫米級的精度。
除了感測器融合技術的難度外,彭博社也指出,特斯拉的優勢在於硬體基礎成本。Model Y 的總成本僅為 Waymo 車輛的七分之一。
這種巨大的成本差異直接源自特斯拉和 Waymo 實現自動駕駛的不同方式。Waymo 的車輛採用高端第三方電動車款,像是已停產的 Jaguar I-Pace,再改裝昂貴的客製化感測器套件。這套感測器包含多組 LIDAR 單元、雷達和攝影鏡頭。
與此同時,特斯拉將所有自動駕駛硬體列為每輛車的標準配備,包括相對便宜的攝影機套件和自家設計的 FSD 電腦。採用經濟實惠的硬體意味著更容易量產並投放更多車輛,從而獲取更多數據。
除此之外,隨著時間推移,以更低價格生產更多車輛會創造越來越大的經濟差距,因為特斯拉的 Robotaxi 將比 Waymo 的快得多實現盈利。
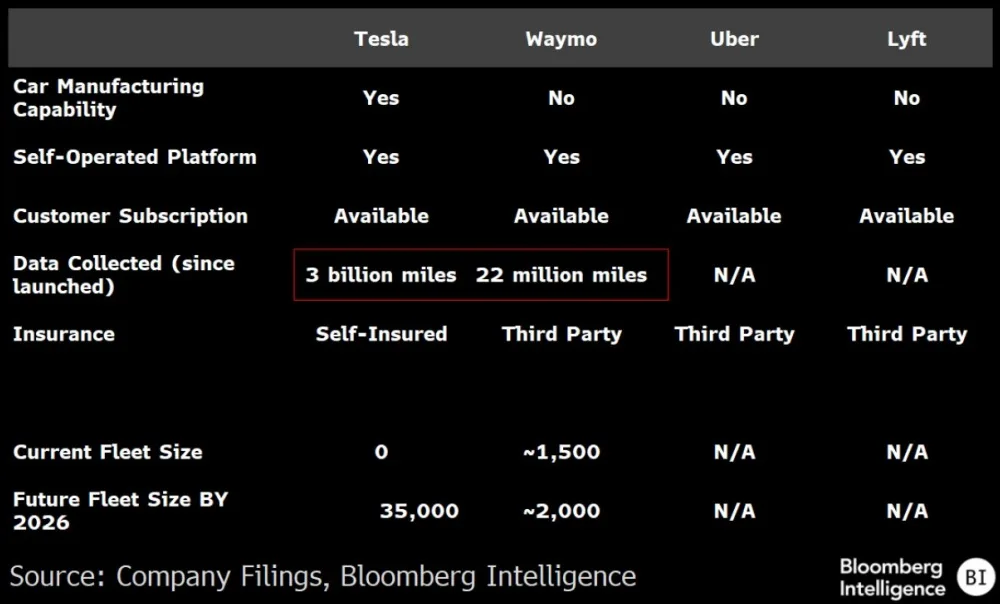
特斯拉在自動駕駛領域相較其他競爭者的最大優勢,簡單來說就是數據。特斯拉車隊已在全球累積超過 30 億英里的行駛數據,而 Waymo 車隊僅有微不足道的 2200 萬英里。
換個角度來看,Waymo 車輛每行駛一英里,特斯拉已行駛超過 135 英里。特斯拉的另一項優勢在於其數據具有全球性,涵蓋從沙漠到北極、從城市到極偏遠地區等各種環境下運行的車輛,能夠實現通用型自動駕駛。
Waymo 的數據過度集中在都市和郊區,實際上無法應用於通用車輛自動駕駛。畢竟,要提供有效的無人計程車服務,關鍵在於擁有規模更大、能力更強的車隊。
最終,Waymo 並不生產車輛。特斯拉從零開始打造 Robotaxi,每輛下線的車輛都具備運行「FSD 全自動駕駛」的能力,最終都能加入 Robotaxi 車隊。Waymo 需要與擁有良好平台的其他公司合作,而且必須讓他們的技術適應那個平台。
預計到 2025 年底,Waymo 的車隊規模將達到 2,500 輛,而彭博社預測特斯拉的功能性車隊同期將達到 35,000 輛。這還不包括到 2026 年底可能加入車隊的數百萬輛 AI4 驅動車輛。
總體而言,特斯拉在自動駕駛計程車競賽中明顯領先,這不僅僅是因為單一因素。他們憑藉數據、成本和可擴展性取勝,而且這個差距只會持續擴大。





